








Key Features and Advantages
-

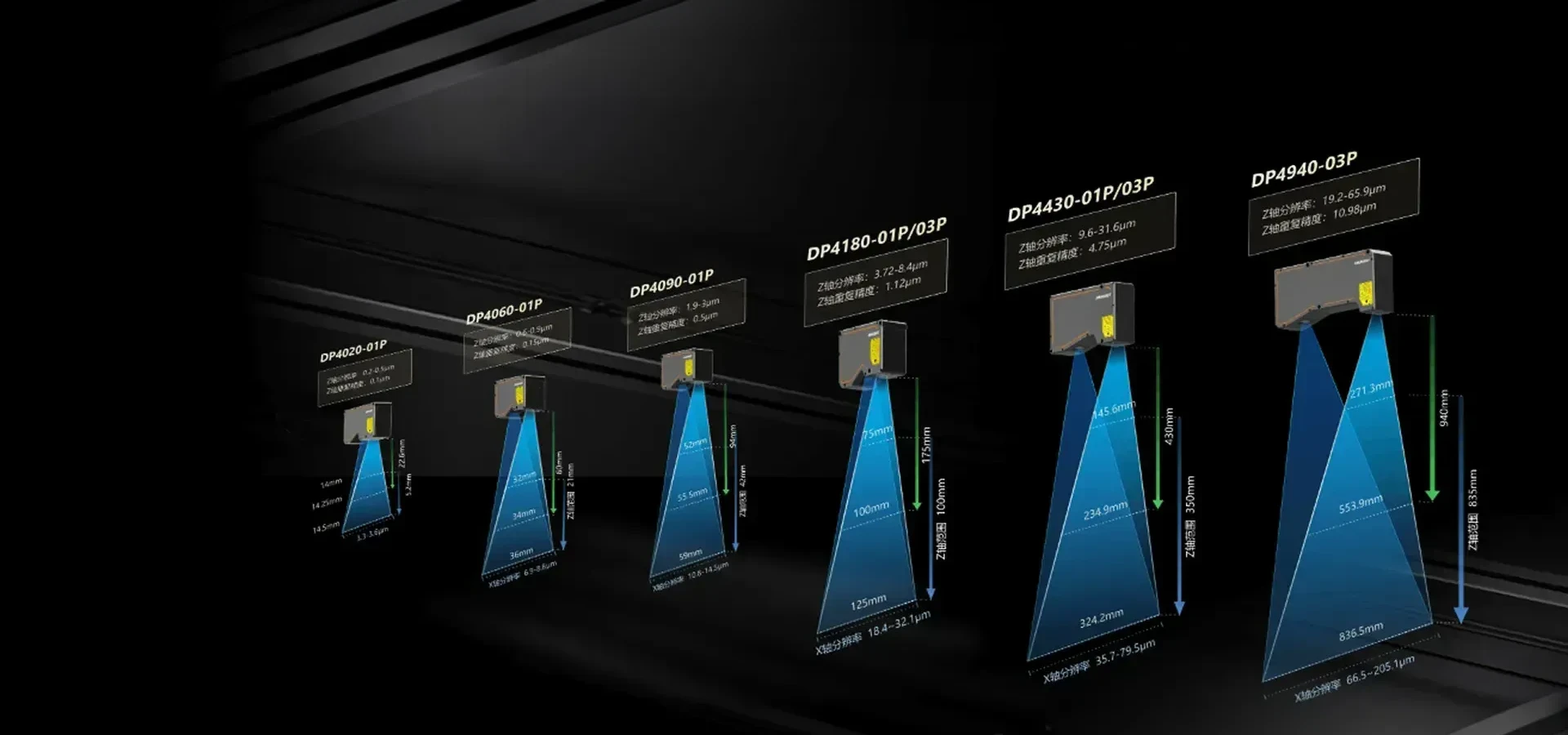
 High precision and high resolution
High precision and high resolution -
 Balance of Performance and Price
Balance of Performance and Price -
 Wide range, wide field of view
Wide range, wide field of view
PRODUCT LIST



Swipe Left
| PMD02-E1 | PMD03-E1 | PS802-E1 | PS800-E1 | PM806-E1 | |
|---|---|---|---|---|---|
| Technical Principles | Active stereo | Active stereo | Active stereo | Active stereo | Active stereo |
| Laser wavelength | 940nm | 940nm | 940nm | 940nm | 850nm |
| Light source | 2 x infrared lasers (λ = 940 nm) 4 x infrared floodlights | 2 x infrared lasers (λ = 940 nm) 4 x infrared floodlights | 1 x infrared laser 1 x infrared floodlight | 1 x infrared laser 1 x infrared floodlight | 2 x infrared lasers |
| Shutter Type | Global | Global | ROlling | ROlling | Global |
| Rendering delay | <900ms | <900ms | 1695ms | Default mode: approx. 1781 ms Quality mode: approx. 958 ms Fast mode: approx. 568 ms | 1672ms |
| Depth Resolution | 1.54 fps @ 2048 x 1536 1.54 fps @ 1024 x 768 1.54 fps @ 512 x 384 | 1.54 fps @ 2048 x 1536 1.54 fps @ 1024 x 768 1.54 fps @ 512 x 384 | 0.8 fps @ 1280 x 960 0.8 fps @ 640 x 480 0.8 fps @ 320 x 240 | 0.8 fps @ 1280 x 960 0.8 fps @ 640 x 480 0.8 fps @ 320 x 240 | 0.87 fps @ 1280 x 960 0.87 fps @ 640 x 480 0.87 fps @ 320 x 240 |
| Frame Rate @ Resolution (Color) | 3fps@2560 x 1920@YUYV 4fps@2560 x 1920@CSI BAYER12GBRG 7fps@1920 x 1440@YUYV 14fps@1280 x 960@YUYV 15fps@640 x 480@YUYV | 3fps@2560 x 1920@YUYV 4fps@2560 x 1920@CSI BAYER12GBRG 7fps@1920 x 1440@YUYV 14fps@1280 x 960@YUYV 15fps@640 x 480@YUYV | 4fps@2560 x 1920@YUYV 6fps@2560 x 1920@CSI BAYER12GBRG 8fps@1920 x 1440@YUYV 16fps@1280 x 960@YUYV 25fps@640 x 480@YUYV | 4fps@2560 x 1920@YUYV 6fps@2560 x 1920@CSI BAYER12GBRG 8fps@1920 x 1440@YUYV 16fps@1280 x 960@YUYV 25fps@640 x 480@YUYV | 4fps@2560 x 1920@YUYV 6fps@2560 x 1920 CSI BAYER12GBRG 8fps@ 1920 x 1440@YUYV 16fps@1280 x 960@YUYV 25fps@640 x 480YUYV |
| RGB Resolution | Support | Support | Support | Support | Support |
| Output image | Depth map, colour image, infrared image, point cloud | Depth map, colour image, infrared image, point cloud | Depth map, colour image, infrared image, point cloud | Depth map, colour image, infrared image, point cloud | Depth map, colour image, infrared image, point cloud |
| Accuracy(Z) | 0.09 mm@600 mm 0.24 mm@1100 mm | 0.79mm@1500mm 2.70mm@2500mm | 2.52mm@1500mm 4.33mm@2500mm | 0.51mm@500 mm 2.01mm@1000mm | 2.48mm@2000mm 4.25mm@3000mm |
| Accuracy(XY) | 1.4 mm@600 mm 2.5 mm@1100 mm | 3.35mm@1500mm 5.63mm@2500mm | 3.43mm@1500mm 5.72mm@2500mm | 4.57mm@2000mm 6.86mm@3000mm | 4.57mm@2000mm 6.86mm@3000mm |
| FOV(H/V) | 52°/41° | 51°/41° | 61°/48° | 61°/48° | 62°/49° |
| Baseline | 160mm | 350mm | 100mm | 62mm | 450mm |
| Working Distance | 500mm-1100mm | 1000mm~3000mm | 700mm~2500mm | 400mm~800mm | 1250mm~4300mm |
| Maximum range | 400mm-1500mm | 1000mm~4000mm | 400mm ~ 4000mm | 300mm~1000mm | 800mm~4500mm |
| Near field | 425 mm x 378 mm @ 500 mm | 815 mm x 757 mm @ 1000 mm | 780mm x 625mm@700mm | 327mm x 268mm@300mm | 1520mm x 1150mm@125 mm |
| Far field | 1073 mm x 831 mm @ 1100 mm | 2876 mm x 2271 mm @ 3000 mm | 2945mm x 2225mm@2500mm | 1190mm x 895mm@1000mm | 4190mm x 3900mm@4300mm |
| Host operating system | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS |
| Software Development Kit | Camport SDK 4 (C/C++) | Camport SDK 4 (C/C++) | Percipio Camport SDK; supports C, C++, C#, Python and others | Percipio Camport SDK; supports C, C++, C#, Python and others | Percipio Camport SDK; supports C, C++, C#, Python and others |
| Size | 290mm x 84mm x 65mm | 480 mm x 84 mm x 65 mm | 154 mm x 55 mm x 60 mm | 140.6 mm x 47.0 mm x 60.0 mm | 538.4mm x 85.5mm x 89.6mm |
| Weight | 1251g | 1368g | 680g | 544g | 2150g |
| Data Connector | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet | Gigabit Ethernet |
| Power Supply | M12 X-Code 8-pin aviation connector | M12 X-Code 8 | M12 X-Code 8 | M12 X-Code 8 | M12 X-Code 8 |
| Power & Trigger Connector | M12 X-Code 8-pin aviation connector | M12 A-Code 8-pin aviation connector | M12 A-Code 8-pin aviation connector | M12 A-Code 8-pin aviation connector | M12 A-Code 8-pin aviation connector |
| Power Consumption | <21W | <21.5W | < 13.5 W | ≤ 10.5W | <16W |
| Housing Material | Carbon fibre and aluminium alloy | Carbon fibre and aluminium alloy | aluminium alloy | aluminium alloy | Carbon fibre and aluminium alloy |
| Ingress Protection | IP65 | IP65 | IP65 | IP65 | IP54 |
| Cooling method | Passive cooling | Passive cooling | Passive cooling | Passive cooling | Passive cooling |
| Installation Method | Mechanical fastening (M5 screw) | Mechanical fastening (M5 screw) | Mechanical fastening (M4 thread) | Mechanical fastening (M4 thread) | Mechanical fastening (M5 screw) |
| Supply voltage | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) |
| Temperature | 0 ℃ ~ 45 ℃ | <21.5W | 0 ℃ ~ 45 ℃ | 0 ℃ ~ 45 ℃ | 0 ℃ ~ 45 ℃ |
| Storage temperature | -10 ℃~ 55 ℃ | -10 ℃~ 55 ℃ | -10 ℃~ 55 ℃ | -10 ℃~ 55 ℃ | -10 ℃ ~ 55℃ |
|
Compare
|
Compare
|
Compare
|
Compare
|
Compare
|
[1] Latency of image acquisition: The latency time between the host computer sending the software trigger signal and receiving depth images from the camera when the camera works in software trigger mode. This is measured with the camera’s User Set at default (Standard), varying only the depth image resolution.